
🎓 教育背景
教育经历
| 学校 | 学院 | 专业 | 学位 | 时间 |
|---|---|---|---|---|
| 天津大学 | 电气自动化与信息工程学院 | 控制科学与工程 | 硕士(推免) | 2023.9-2026.6 |
| 天津大学 | 未来技术学院 | 自动化 | 本科 | 2019.9-2023.6 |
专业技能
- 编程:熟练掌握Python、C++和C#,有嵌入式开发经验。
- 机器人:熟悉ROS,掌握主流定位与导航算法,具备丰富的机器人开发经验。
- AI与工具链:能用PyTorch设计深度学习模型,熟练使用SolidWorks、Unity等工具
自我评价
- 基础素质:本硕均就读于天津大学,成绩优异,具备多学科交叉背景,自主学习能力强。
- 项目经验:参与多个跨学科项目,熟练多种编程语言及嵌入式和机械设计,具备良好团队协作能力。
- 学习态度:对机器人行业充满热情,关注前沿技术,积极学习新知,致力于将所学应用于实际。
📝 学术成果
Arxiv
ICRA 2025

🏆 竞赛获奖
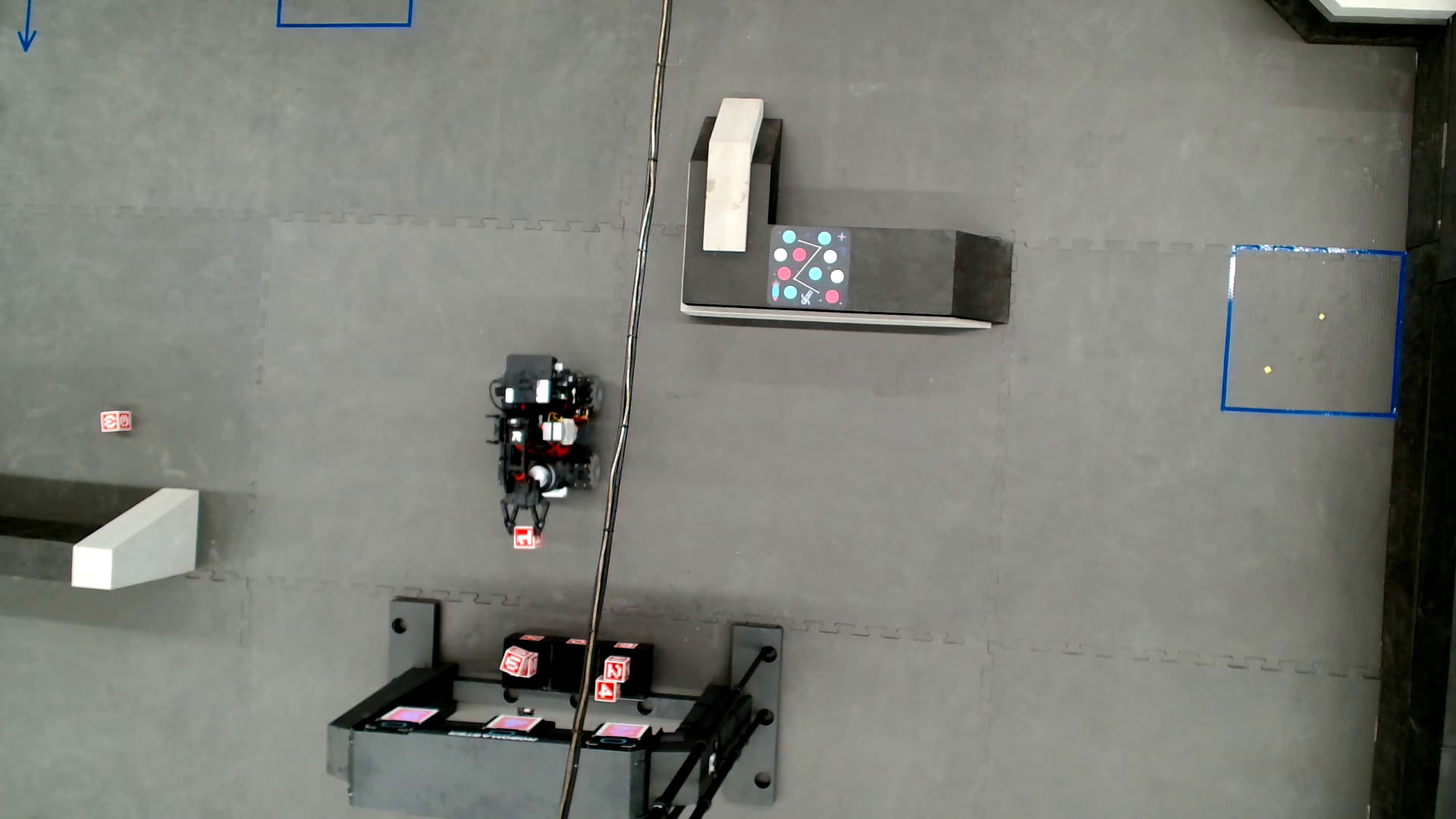
RoboMaster University Sim2Real Challenge (RMUS) 第一名 2023.12-2024.5
作为队长,带领团队完成EP机器人自主搜寻与堆放矿石任务,核心为亚厘米精度视觉伺服,攻克运动模糊和控制解耦难题。
主要贡献:
- 导航系统:鉴于2D激光雷达+全向底盘配置,使用Cartographer定位,Teb导航。
- 感知系统:结合ArUco与LeNet分类器,实现1ms推理,0.6cm/1.9°精度。
- 伺服系统:反馈线性化解耦控制,系统辨识参数,实际达亚厘米精度。
RoboMaster 2023赛季 联盟赛一等奖 超级对抗赛全国赛三等奖 2022.9-2023.9
负责哨兵机器人导航与决策功能。
主要贡献:
- 方案设计:采用2D激光雷达+工控机硬件,使用Cartographer SLAM,A*全局+Teb局部规划。
- 串口通信:使用明文字符串传输控制与心跳指令,主控超时接管。
- 算法调试:使用Gazebo仿真,运用状态机控制巡逻与扫描。
🛠️ 项目经历

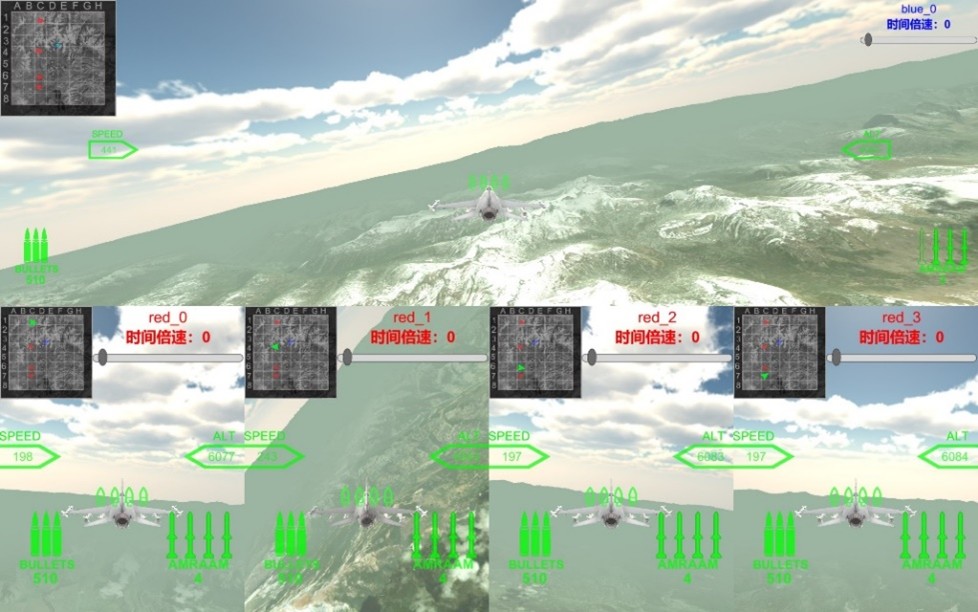
基于任务场景的通信集群联合仿真系统开发 XXX项目 2023.9-2024.9
工作描述:基于Unity开发无人机集群高保真仿真系统,验证通信、编队、任务分配、避碰、轨迹规划等能力。
主要贡献:
-
场景构建:搭建机场与港口三维场景,构建29种任务目标模型,运用泊松盘采样在场景中动态生成目标。
-
通信网络:将Unity接入ROS,形成224架仿真和32架半实物无人机通信网络。
-
性能评估:使用层次分析法计算场景整体任务执行效果。
-
用户界面:使用Unity UI组件实现视角与场景管理、地图沙盘推演和性能评估结果可视化等其他设置。
多智能体博弈动态覆盖策略研究 南开大学项目 2023.9-2023.12
工作描述:研究多智能体协同运动策略,计算覆盖所需数量,近距离采用动态攻防博弈决策。
主要贡献:
- 覆盖数量计算:通过几何分析,推导围捕所需智能体数量的计算方法。
- 动态攻防决策:利用模糊决策树,根据对局态势动态选择机动与火力动作。
💻 开源项目
Unity
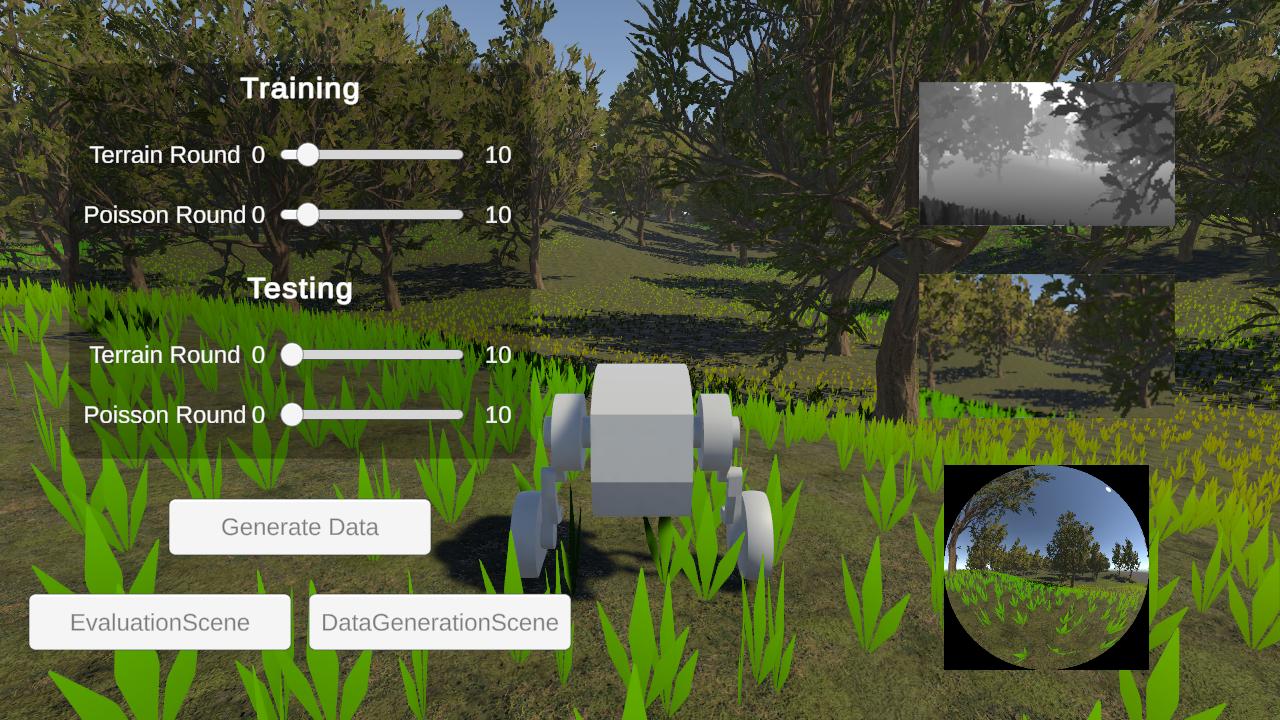
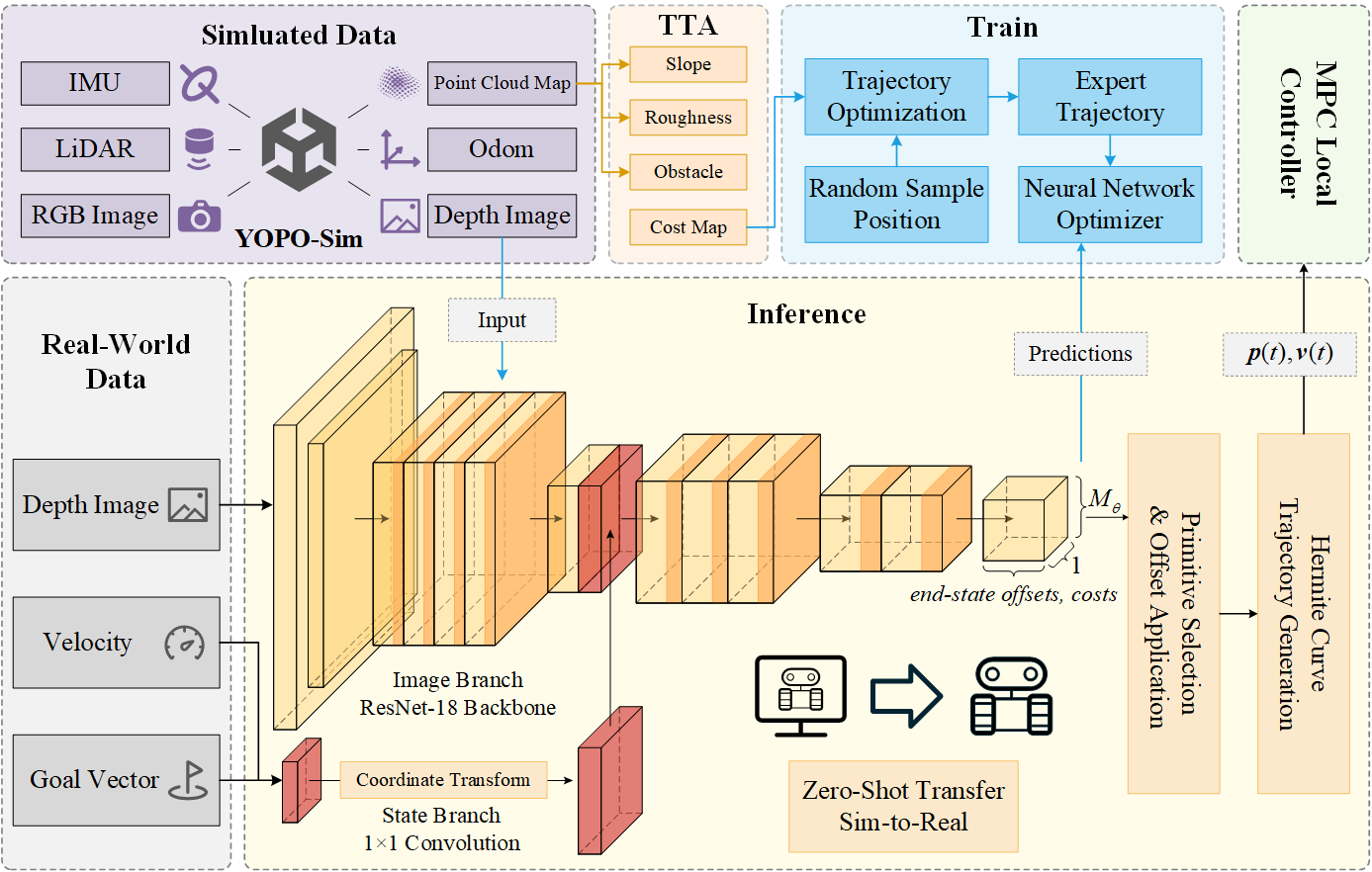
YOPO-Sim

基于Unity开发的高性能、支持多传感器、兼容ROS的车辆越野仿真器。
主要功能:
- 多传感器支持:集成多种传感器,包括RGB相机、深度相机、鱼眼相机、激光雷达和惯性测量单元。
- 随机生成环境:程序化批量生成多样化的越野地形和植被。
- 数据生成:批量保存多种数据,包括图像、车辆姿态和点云地图。
- ROS集成:通过ROS TCP Connector与ROS无缝连接,实现实时数据流传输。
Unity
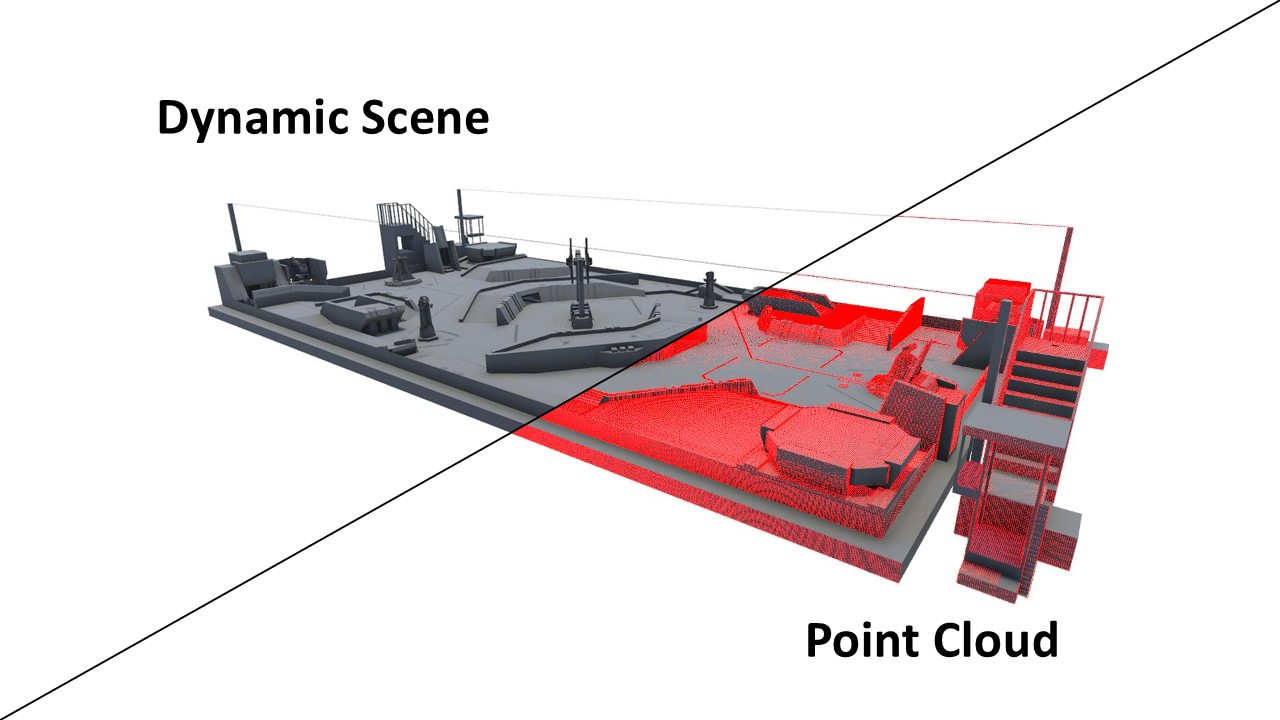
VoxelGenerator

用于实时点云生成的Unity包,基于碰撞体生成体素点云。
主要功能:
- 实时生成:实时生成大规模场景的点云数据。
- 高性能:采用分层并行检测策略,实现高效的体素生成。
- 数据导出:支持将点云数据导出为.ply和.pcd格式文件。
Unity
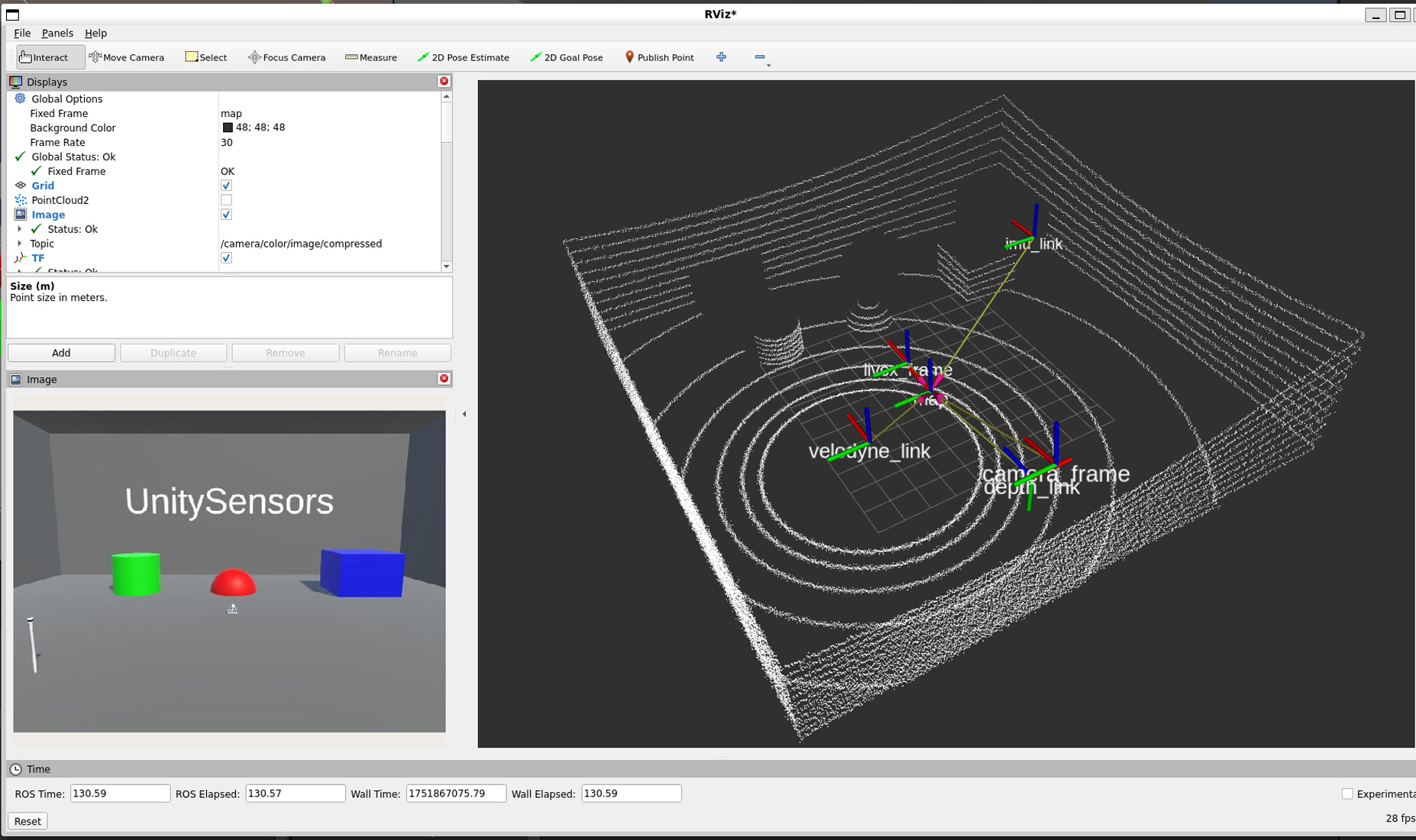
UnitySensors

基于Unity开发的高性能、兼容ROS的多种传感器模拟包。
主要贡献:
- 完善深度相机,以支持不同渲染管线
- 增加坐标变换(TF)传感器
- 增加鱼眼相机传感器,编写Shader采样立方体贴图,从像素坐标反求世界坐标,支持等距模型与EUCM模型